Superskalaarsed protsessorid — määratlus, tööpõhimõte ja eelised
Superskalaarsed protsessorid — määratlus, tööpõhimõte ja eelised: kuidas käsutasona paralleelsus, dubleeritud funktsionaalsed üksused ja torustik tõstavad protsessori jõudlust.
Superskalaarse protsessori konstruktsioon võimaldab ühe protsessori tuumas saavutada käsu-tasandi paralleelsuse, mis tähendab, et sama taktimäära juures saab protsessor teha rohkem tööd. Tegemist on arhitektuuriga, kus protsessor suudab ühe taktsükli jooksul täita rohkem kui ühe käsu — seda saavutatakse käskude samaaegse käivitamise jaotamise (nn käskude jaotamine) kaudu duplikaatsetele funktsionaalsetele üksustele. Iga funktsionaalne üksus on protsessori südamikus asuv täitmisressurss, nagu aritmeetiline loogikaüksus (ALU), ujukomaarvutusüksus (FPU), bitišifter või korrutisüksus.
Pildigalerii
2 Pildid
Määratlus ja eristus
Superskalaarne protsessor on skaalarprotsessori laiendus: iga käsk ikkagi töötleb tavaliselt ühte andmeühikut, kuid protsessori tuumas on mitu duplikaatset funktsionaalset üksust, nii et mitu sõltumatut käsku saavad käia paralleelselt. See erineb vektorprotsessorist (kus üks käsk töötleb korraga paljusid andmeelemente) ja VLIW-i (Very Long Instruction Word), kus paralleelsus määratakse kompilaatori tasemel staatiliselt. Superskalaarsus on dünaamiline: riistvara tuvastab ja käivitab paralleelselt täidetavad juhised jooksvalt.
Tööpõhimõte — kuidas superskalaarsus saavutatakse
Superskalaarset tehnikat toetavad mitu tuuma omadust ja tööetappi:
- Juhised pärinevad järjestatud juhiste nimekirjast (programmi järjekord).
- Protsessori riistvara suudab välja selgitada andmesõltuvused käskude vahel (kes sõltub kelle tulemusest).
- Protsessor suudab lugeda ja dekodeerida mitu käsku ühe taktitsükli kohta ja otsustada, millised neist saab samaaegselt välja saata (issue) ja täita (execute).
Superskalaarses seadistuses vastutab käskude saatja (dispatcher/issue logic) käskude lugemise ja analüüsi eest ning otsustab, millised käsud suunatakse millisele funktsionaalsele üksusele. Kui riistvara tuvastab sõltumatud käsud, saab ta need paralleelselt välja saata ning täitmine võib toimuda samaaegselt.
Olulised komponendid ja mehhanismid
- Funktsionaalsed üksused: mitut ALU-d, FPU-sid, loogika- ja liitmisüksusi, mis võimaldavad paralleelset täitmist (palju sõltub disainist; tüüpiliselt võib tänapäevane protsessor omada mitut ALU-d, mitut FPU-d ja SIMD-üksusi).
- Käskude saatja ja planeerija: loeb, dekodeerib ja otsustab, millised käsud välja anda või edasi lükata.
- Riistvaraline dünaamiline ajastamine (dynamic scheduling): võimaldab välja anda käske väljaspool algset järjestust, säilitades programmi nähtava järjekorra abil korrektse tulemuse (näiteks Tomasulo algoritm, register renaming).
- Registerite ümbernimetamine (register renaming): kõrvaldab kirjutamise/järjestussõltuvusi (WAW ja WAR) ja lubab laialdasemat paralleelsust.
- Hargnemise ennustamine (branch prediction) ja spekulatiivne täitmine: minimeerivad kontroll-sõltuvuste (branch) tõttu tekkinud ooteaegu.
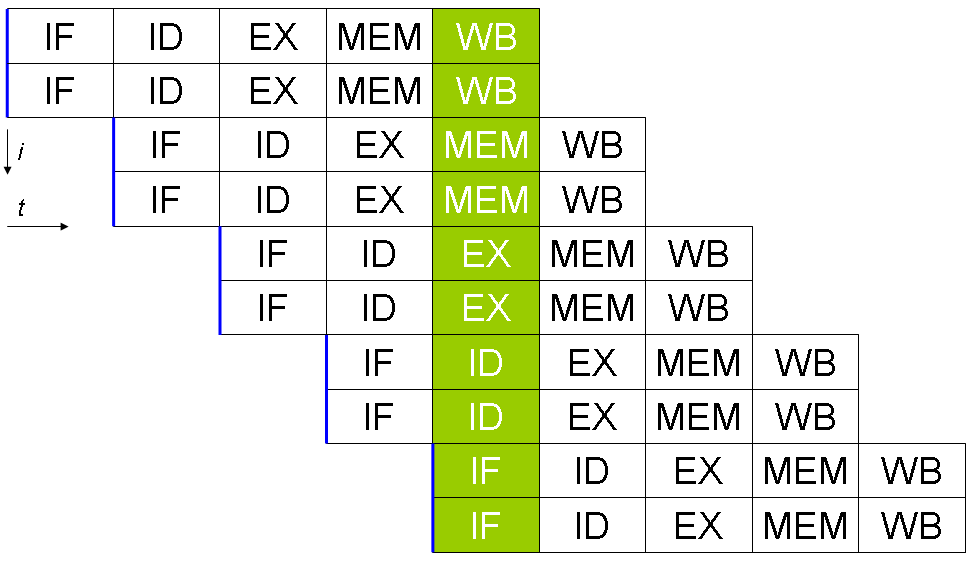
- Pipelining: enamik superskalaarsetest protsessoritest on ka torustikuga (pipeline), kus iga käsk läbib mitu täitmisetappi; see suurendab läbivoolu (throughput) kombineeritult superskalaarsusega.
Eelised
Superskalaarne disain pakub mitmeid praktilisi eeliseid:
- Suurem jõudlus ( kõrgem IPC — instructions per cycle), sest protsessor täidab samal ajal mitut käsku.
- Hea jõudluse kasv ilma sagedust tõstmata — st sama takti juures rohkem tehtud tööd.
- Paindlikkus: dünaamiline ajastamine ja riistvaraline paralleliseerimine võimaldavad realiseerida juhise-tasandi paralleelsust ilma kompilaatori keerukate transformatsioonideta.
- Üldotstarbelised protsessorid on muutunud laialdaselt superskalaarseks — alates 2000. aastatest kõik suuremad töölauaprotsessorid kasutavad erineva astmega superskalaarsust ning alates 2008. aastast on see praktiliselt standard paljudes üldotstarbelistes protsessorites. Tüüpiline kaasaegne superskalaarne protsessor võib sisaldada näiteks kuni 4 ALU-d, 2 FPU-d ja mitmeid SIMD-üksusi.
Piirangud ja probleemid
Superskalaarsus ei garanteeri lõpmatut kiirendust — selle efektiivsus sõltub juhistevahelisest sõltuvusest ja muust riistvara piirangustest:
- Andmesõltuvused (RAW, WAR, WAW) piiravad, kui palju käske saab tõepoolest samaaegselt täita.
- Struktuursed konfliktid: kui mitu käsku nõuavad samaaegselt sama funktsionaalset üksust (nt ainult üks adder saadaval), tekib kitsaskoht.
- Käskude toomise ja dekodeerimise kitsaskohad: käskude tõmbamine ja dekodeerimine peab toimuma piisava laiusega (fetch/decoder bandwidth), muidu ei saa dispetšer piisavalt tööd pakkuda.
- Hargnemised ja spekulatsioon: ebatäpsed hargnemise ennustused ja spekulatiivse täitmise tagasiheit võivad põhjustada suure hulga tühikäike ja ajakadu.
- Skaleerimise keerukus: laiema superskalaarsuse toetamine (nt 8+ issue width) suurendab riistvara keerukust ja energiatarvet, ning kasulik IPC kasv kipub hääbuma tänu kasvavale sõltuvusele juhistest ja piiratud paralleelsusele.
Tehnilised meetodid piirangute ületamiseks
Selleks, et hoida funktsionaalsed üksused hõivatuna ja suurendada efektiivset paralleelsust, kasutatakse mitmeid tehnikaid:
- Riistvaraline register renaming — eemaldab kunstlikud sõltuvused.
- Dünaamiline ajastamine (out-of-order execution) — võimaldab välja anda käske väljaspool algset järjestust, asetades ettepoole sõltumatuid käske.
- Tõhus branch prediction ja spekulatiivne täitmine — vähendavad kontrolliga seotud latentsust.
- Suurem ja parem käskude eeltoomine (pre-fetch), mitmekanaliline instruktsioonivahemälu ja kiirem dekodeerimine.
Võrdlus teiste meetoditega
Superskalaarsus erineb mujalt tulevast paralleelsusest:
- VLIW (Very Long Instruction Word) usaldub paralleelsuse määramisel kompilaatorile, superskalaarsus teostab selle dünaamiliselt riistvaras.
- SMT (Simultaneous Multithreading) laseb eri niitidel (threads) kasutada samaaegselt samu funktsionaalseid üksusi; superskalaarsus keskendub ühe niidi sees juhiste paralleelsusele.
- Vektor- ja GPU-arhitektuurid töötlevad massiivset andmeparalleelsust samaaegselt, superskalaarsus on optimeeritud juhise-tasandi (instruction-level) paralleelsusele üldotstarbeliste programmide jaoks.
Praktilised näited ja ajalooline kontekst
Paljud tuntud protsessorid on kasutanud superskalaarsust: varasemad x86 disainid (nt Intel Pentium Pro/II/III ja hiljem Core-seeria), AMD protsessorid, samuti kaasaegsed ARM Cortex-A tuumad. Superskalaarsed disainid on arenenud koos torustiku-, hüpoteetilise täitmise ja branch-prediction tehnoloogiatega, mis võimaldasid üldjuhul märgatavat IPC kasvu võrreldes lihtsamate skalaarsete protsessoritega.
Kokkuvõte
Superskalaarne arhitektuur on võimas meetod, et tõsta protsessori jõudlust ilma ainult taktsagedust suurendamata. Selle edu sõltub riistvara võimest tuvastada ja käitada paralleelselt sõltumatuid juhiseid ning hoida mitu funktsionaalset üksust efektiivselt hõivatuna. Kuigi superskalaarne disain on tänapäevastes üldotstarbelistes protsessorites laialt levinud, piiravad selle kasu andmesõltuvused, struktuursed konfliktid ja tõrked käskude toomises/ennustamises — seetõttu kasutatakse kombineeritult mitmeid täiustusi (register renaming, out-of-order execution, branch prediction jne).


Piirangud
Superskalaarsete protsessorite disaini jõudluse parandamist piiravad kaks asja:
- Sisseehitatud paralleelsuse tase käskude loetelus
- dispetšeri ja andmete sõltuvuse kontrollimise keerukus ja ajakulu.
Isegi kui tavalise superskalaarse protsessori sees on lõpmatult kiire sõltuvuse kontrollimine, siis kui käsulistis endas on palju sõltuvusi, piiraks see samuti võimalikku jõudluse paranemist, seega on koodis oleva sisseehitatud paralleelsuse hulk veel üks piirang.
Olenemata sellest, kui kiire on dispetšeri kiirus, on praktiline piirang sellele, kui palju juhiseid saab korraga saata. Kuigi riistvara areng võimaldab rohkem funktsionaalseid üksusi (nt ALUd) protsessori südamiku kohta, suureneb käskude sõltuvuse kontrollimise probleem nii palju, et saavutatav superskalaarse dispetšeri piir on mõnevõrra väike. -- Tõenäoliselt on see suurusjärgus viis kuni kuus samaaegselt saadetavat käsku.
Alternatiivid
- Samaaegne mitmikeeramine: sageli lühendatult SMT, on tehnika superskalaarsete protsessorite üldkiiruse parandamiseks. SMT võimaldab mitut sõltumatut täitmisniiti, et paremini kasutada kaasaegses superskalaarses protsessoris olemasolevaid ressursse.
- Mitme tuumaga protsessorid: superskalaarsed protsessorid erinevad mitme tuumaga protsessoritest selle poolest, et mitu üleliigset funktsionaalset üksust ei ole terved protsessorid. Üks superskalaarne protsessor koosneb kõrgetasemelistest funktsionaalsetest üksustest, nagu ALU, täisarvu korrutis, täisarvu teisendaja, ujukomaüksus (FPU) jne. Igast funktsionaalsest üksusest võib olla mitu versiooni, et võimaldada paljude käskude paralleelset täitmist. See erineb mitmetuumalistest protsessoritest, mis töötlevad samaaegselt mitme niidi juhiseid, üks niit iga tuuma kohta.
- Pipelined protsessorid: superskalaarsed protsessorid erinevad samuti pipelined protsessorist, kus mitu käsku võivad samaaegselt olla erinevates täitmisetappides.
Erinevad alternatiivsed tehnikad ei välista üksteist - neid saab (ja sageli ka kombineeritakse) ühes protsessoris, nii et on võimalik projekteerida mitmetuumaline protsessor, kus iga tuum on sõltumatu protsessor, millel on mitu paralleelset superskalaarset torujuhtmeahelat. Mõned mitmetuumalised protsessorid sisaldavad ka vektori võimekust.
Seotud leheküljed
- Paralleelne arvutamine
- Käskude tasandi paralleelsus
- Samaaegne mitmikeeramine (SMT)
- Mitme tuumaga protsessorid
Küsimused ja vastused
K: Mis on superskalaarne tehnoloogia?
V: Superskalaarne tehnoloogia on põhilise paralleelarvutuse vorm, mis võimaldab mitme täitmisüksuse samaaegsel kasutamisel töödelda rohkem kui ühte käsku igas taktsüklis.
K: Kuidas töötab superskalaarne tehnoloogia?
V: Superskalaarne tehnoloogia hõlmab protsessorisse järjestikku saabuvaid juhiseid, mis otsivad töötamise ajal andmesõltuvusi ja laadivad igas taktsüklis rohkem kui ühe juhise.
K: Mis vahe on skalaar- ja vektorprotsessorite vahel?
V: Skalaarprotsessoril töötavad käsud tavaliselt ühe või kahe andmeühikuga korraga, samas kui vektorprotsessoril töötavad käsud tavaliselt paljude andmeühikutega korraga. Superskalaarne protsessor on segu mõlemast, kuna iga käsk töötleb ühte andmeühikut, kuid korraga töötab rohkem kui üks käsk, nii et protsessor töötleb korraga paljusid andmeühikuid.
Küsimus: Millist rolli mängib täpne käskude dispetšer superskalaarses protsessoris?
V: Täpne käskude saatja on superskalaarse protsessori jaoks väga oluline, sest see tagab, et täitmisüksused on alati hõivatud tööga, mida tõenäoliselt vajatakse. Kui käskude dispetšer ei ole täpne, siis võib osa töödest ära visata, mis ei tee seda kiiremaks kui skaleerivat protsessorit.
K: Mis aastal muutusid kõik tavalised protsessorid superskalaarseks?
V: Kõik tavalised protsessorid muutusid superskalaarseks 2008. aastal.
K: Mitu ALU-d, FPU-d ja SIMD-üksust võib olla tavalisel protsessoril?
V: Tavalises protsessoris võib olla kuni 4 ALU-d, 2 FPU-d ja 2 SIMD-üksust.
Seotud artiklid
Autor
AlegsaOnline.com Superskalaarsed protsessorid — määratlus, tööpõhimõte ja eelised Leandro Alegsa
URL: https://et.alegsaonline.com/art/95080