Dead Reckoning (DR) ehk surnud arvestus: navigatsiooni positsiooni hindamine
Avasta Dead Reckoning (DR): kuidas navigatsioonis GPS-i asenduseks või varuplaanina positsiooni hinnatakse merel, õhus ja maanteel.
Dead Reckoning (lühendatult DR) ehk surnud arvestus on lihtne ja pikaajaline meetod positsiooni hindamiseks navigatsioonis. See põhineb viimase teadaoleva positsiooni (fikseeritud punkt) ning selle järel mõõdetud või hinnatud liikumise (kiirus, suund ja aeg) kasutamisel, et arvutada praegust asukohta. Meetod on oluline osa navigatsioonist ning toimib nii merel, õhus kui ka maismaal, eriti olukordades, kus satelliitnavigatsioon (GPS) ei ole kättesaadav.
Pildigalerii
3 Pildid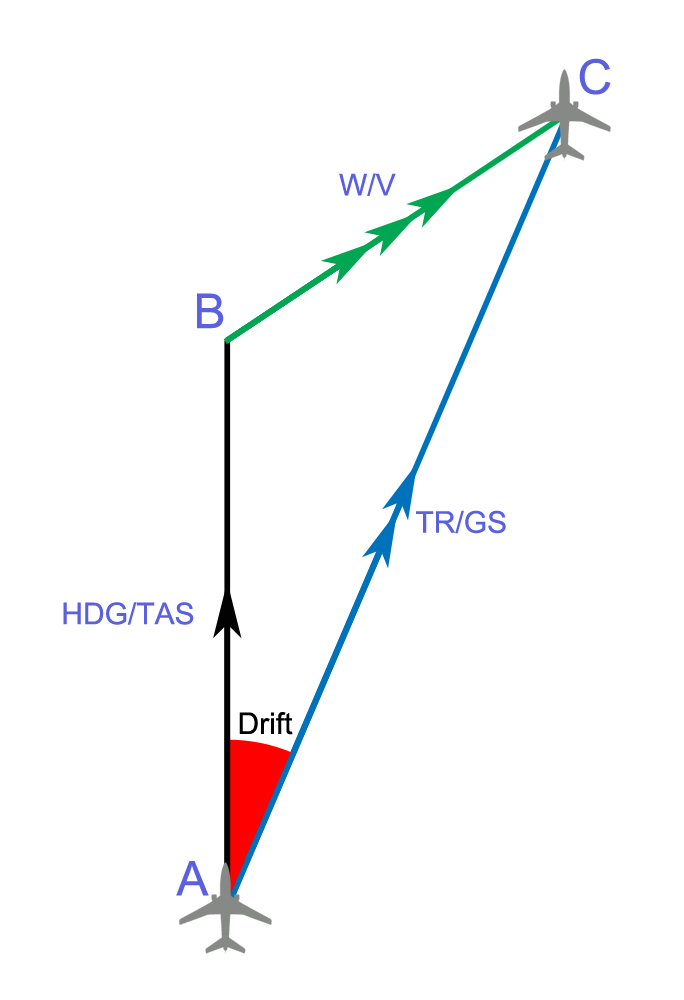


Kuidas dead reckoning töötab
- Määratakse algne fikseeritud positsioon (näiteks radariga, visuaalselt või GPS-iga).
- Mõõdetakse või hinnatakse sõiduki suunda (kompassi-, kursi- või inertiaalandmete alusel) ja kiirust (sõidulogi, spidomeeter, õhukiirus jne).
- Arvutatakse vahemaa, mille võrra on liigutud: vahemaa = kiirus × aeg.
- Suunavektorina lisatakse see viimane nihkevektor algpositsioonile ja saadakse uus hinnanguline positsioon.
Lihtsustatud matemaatiliselt kirjeldatakse seda vektori- või koordinaatide liitmisena: igal sammul liidetakse eelmisele positsioonile kaugus ja suund, arvestades vajalikku teisendust (näiteks kursi ümberarvestus põhja- või ida-lõuna komponentideks).
Tavalised mõisted ja veamallid
- Set ja drift (merenduses): set on merevoolu suund, drift on selle kiirus. Neid tuleb DR-i arvestamisel lisada, sest laev liigub vee suhtes ja vesi liigub maapinna suhtes.
- Leeway (tuule mõjul tekkiv kõrvalkaldenurk): tuul võib laeva kallutada või nihutada, see tuleb samuti arvesse võtta.
- Magnetiline deklinatsioon (varjutus): magnetkompass näitab magnetpõhja, mitte tõelist põhja – kursi ümberarvestamiseks tuleb arvestada deklinatsiooni (varjutust).
- Veakumuleerumine: DR-i suurim nõrkus on see, et vigu koguneb. Iga hinnanguline kiirus, suund või aeg võib olla natuke ebatäpne ning need eksimised kasvavad ajas ja vahemaades.
Instrumendid ja tänapäevased variandid
- Traditsioonilised vahendid: magnetkompass, sõidulogi (laeva kiiruse mõõtja vee suhtes), spidomeeter, kronomeeter ja visuaalsed fikseerimised (maabongid, rannikuobjektid).
- Tänapäevased süsteemid: inertiaalnavigatsioonisüsteemid (INS), mis mõõdavad kiirendusi ja nurkkiirusi; need võivad pikka aega DR-laadsel põhimõttel positsiooni hinnata ilma välise signaalita, kuid ka INS-i puhul kumuleeruvad vead.
- Süsteemide ristkontroll: DR kombineeritakse GPS-i, radariga, AIS-i ja õhus või merel tehtavate fikseeringutega. Ka Kalman'i filtrid ja muud andmesulandid aitavad eri andmeid ühendada ja vigu vähendada.
- Varem kasutati ka raadiosuundajaid, LORANi ja astronavigatsiooni (tähed) DR-i täiendamiseks.
Kasutusvaldkonnad ja näited
DR-i kasutatakse siiani olukordades, kus GPS on puudulik või rikutud, näiteks:
- meres ja lennunduses ajutiste GPS-häirete ajal;
- sukeldumisel ja õhuväes, kus satelliitside võib olla piiratud;
- tsiviil- ja sõjaväe operatsioonides, kus on oht signaali häirimiseks;
- histooriliselt: Christoph Kolumbuse ajastul kasutati tähti, et leida laiuskraadi, kuid enne täpsete kellade levikut ei oldud võimelised hõlpsasti määrama pikkuskraadi. Sel põhjusel loodi ookeanide ületamisel DR põhjal ennustusi asukohast.
Kuulus ajalugu: Richard Byrd kasutas DR-i oma Põhja-pooluse lennul 1926. aastal — ta suutis lennata umbes 16 tundi ja naasta lähtepunkti vaatamata sellele, et maapinda all ei paistnud, vaid ainult jääväljad.
Piirangud ja ohutus
- DR on alati hinnanguline ja eeldab, et sisendandmed on õiged. Vale kiirus, vale kurs või jätkuv hoovus/tuul viivad eksitava positsioonini.
- Seetõttu on ohutuse tagamiseks tähtis teha regulaarseid fikseerimisi (visuaal-, radar- või GPS-fikseeringud), mille abil DR-i parendatakse või nullitakse.
- Meremeestele ja pilootidele õpetatakse DR-i tunnetamist ka hädaolukordadeks (näiteks kui globaalset positsioneerimissüsteemi ei ole või GPS-signal katkeb); seda peetakse oluliseks ka juhul, kui GPS-satelliidid on päikeseplahvatuse tõttu kahjustatud või seadmed on kadunud või katki.
Kuidas DR-i paremini kasutada (praktilised näpunäited)
- Alusta alati usaldusväärsest fikseerimisest ja kirjelda selle täpsust.
- Määra regulaarselt aega, mil arvutusi uuendad — lühemad ajavahemikud vähendavad kumuleeruva vea kasvu.
- Arvesta keskkonnamõjude (vool, tuul, jää) ja instrumentide vea (kompassi kõrvalekalle, logi ebatäpsus) mõjudega.
- Kombineeri DR teiste navigeerimismeetoditega (astronavigatsioon, radar, GPS, AIS).
- Dokumenteeri tehtud eeldused ja parameetrid (nt kasutatud kursi tüüp: magnetiline või tõeline, kasutatud kiirusallikas), et veaallikaid hiljem kontrollida.
Kuigi tänapäeval on globaalne positsioneerimissüsteem muutnud igapäevase navigatsiooni lihtsamaks, on dead reckoning endiselt vajalik põhimõte ja hädavajalik oskus situatsioonides, kus satelliite ei saa kasutada. See teadmistekomplekt aitab navigeerijal mõista positsiooni tõlgendamise piiranguid ning teha ohutumaid otsuseid merel ja õhus.

Meetod
Surnud ajaarvamine algab teadaolevast punktist (fikseeritud punktist). Seejärel peab olema teada sõiduki kiirus. Vanasti viskasid laevad üle parda (köiega seotud) palgi ja loendasid, kui kaua kulus selle palgi läbimiseks (või tõmbasid sõlmedega köit ja loendasid, mitu sõlme teatud aja jooksul välja tõmmatakse). See annaks laeva kiiruse. Kompassilt suuna teadmine annaks suuna. Nende kahe numbri põhjal saaks teha hinnangu (hea oletuse) sõiduki praeguse asukoha kohta. Tuul aga lükkab sõidukit ühele poole (nn triiv), nii et ka seda tuleb mõõta. Samuti on vees hoovused, isegi keset ookeani. Aja jooksul võib ka see põhjustada vigu, seega tehti kaardid, et korrigeerida hoovusi.
Lennukid saavad hõlpsasti mõõta oma tuule kiirust (kui kiiresti nad liiguvad läbi õhu), kuid mitte seda, kui kiiresti nad liiguvad üle maa (mida nimetatakse maapealseks kiiruseks). Vastu-, taga- või külgtuul muudab maapealset kiirust. Kui lennuki kõrgus on teada, siis saab maapealse kiiruse leida, mõõtes, kui kiiresti lennuk möödub maapinnal asuvast objektist. (Mida kõrgemal te olete, seda aeglasemalt näib maapind liikuvat). Lennuki põrandal oleva akna abil saab leida maapealse kiiruse ja lennuki triivimise.
Maapealne sõiduk võib kasutada ka surnud arvestust. Tavaliselt ei pea nad muretsema tuulest tingitud triivimise pärast ja maal puuduvad hoovused, seega on selline arvestus lihtsam.
Küsimused ja vastused
K: Mis on Dead Reckoning?
V: Dead Reckoning (või DR) on meetod asukoha hindamiseks, kasutades viimast teadaolevat punkti, kiirust ja liikumissuunda.
K: Milleks kasutatakse Dead Reckoning'i?
V: Dead Reckoning'i kasutatakse laeva, lennuki või sõiduki asukoha jälgimiseks.
K: Miks ei kasutata Dead Reckoning'i praegu nii palju?
V: Nüüd kasutatakse navigatsiooniks globaalset positsioneerimissüsteemi (GPS), mistõttu on Dead Reckoning vähem oluline.
K: Millistes olukordades on Dead Reckoning endiselt kasulik?
V: Dead Reckoning on kasulik piirkondades, kus GPS ei ole kättesaadav, või lühiajaliselt, kui GPSi uuendamine jääb ära.
K: Miks on oluline teada Dead Reckoningist?
V: Dead Reckoning on oluline juhul, kui GPS-satelliidid on kahjustatud või seadmed on kadunud, nii et meremehed ja piloodid saavad endiselt navigeerida.
K: Kuidas kaardistasid meremehed maailma pärast Christoph Kolumbuse tulekut Uude Maailma?
V: Meremehed kasutasid laiuskraadi leidmiseks ja maailma kaardistamiseks Dead Reckoning'i ja tähti.
K: Kuidas sai Richard Byrdist esimene inimene, kes lendas põhjapoolusele?
V: Richard Byrd kasutas 1926. aastal Dead Reckoning'i, et lennata põhjapoolusele, lennates 16 tundi ja naastes sinna, kust ta oli lahkunud, kusjuures tema all olid ainult jääväljad.
Seotud artiklid
Autor
AlegsaOnline.com Dead Reckoning (DR) ehk surnud arvestus: navigatsiooni positsiooni hindamine Leandro Alegsa
URL: https://et.alegsaonline.com/art/25956
Allikad
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"