Itanium: Inteli 64-bitine serveriprotsessorite arhitektuur (lõpetatud 2019)
Itanium — Inteli 64-bitine serveriarhitektuur: ajalugu, tehnilised eripärad ja kasutuse lõpp 2019. Miks see ei laialdastunud ja kus Itaniumi süsteeme veel toetatakse.
Itanium (/aɪˈteɪniəm/ eye-TAY-nee-əm) on 64-bitise kiibiarhitektuuriga Inteli mikroprotsessorite tüüp, mis ei ole otseselt seotud Inteli ja teiste tootjate laialdaselt levinud 64-bitiste x86‑põhiste protsessoritega. Itaniumi protsessoreid kasutati peamiselt serverites ja suure jõudlusega töökoormustes. Arhitektuuri töötasid välja peamiselt Hewlett-Packard (HP) ja Intel; Intel vastutas kiipide tootmise eest ning mitmed süsteemitootjad kasutasid neid plaforme. Kuigi projektil olid suured eesmärgid, ei saavutanud Itanium oodatud turulevikut ja ökosüsteemi laiahaardelist toetust. Enamiku Itaniumi‑põhiste süsteemide tootmise ja toe eest vastas peamiselt HP (hiljem Hewlett Packard Enterprise).
Intel teatas ametlikult Itanium‑perekonna kasutusaja lõppemisest ja toote lõpetamisest 30. jaanuaril 2019.
Pildigalerii
10 Pildid








Arhitektuuri põhitunnused
Itaniumi arhitektuuri tähistatakse sageli lühendiga IA‑64. See põhines EPIC (Explicitly Parallel Instruction Computing) ideel — disainerid püüdsid liigselt koodeksis paralleelsust ja anda kompilaatorile ülesanne paigutada instruktsioonid nii, et riistvara saaks neid paralleelselt täita. See mudel sarnaneb VLIW‑i (Very Long Instruction Word) kontseptsiooniga, kuid sisaldab täiendavaid funktsioone ja keerukust, et toetada tipptasemel serveritöökoormusi.
Tarkvara ja ühilduvus
Itanium ei olnud ühildatav traditsioonilise x86 käsukomplektiga, mistõttu nõudis ta olemasoleva tarkvara jaoks kas ümberkompileerimist või emuleerimist. See tekitas olulise takistuse laialdasele levikule, sest suur hulk serveritarkvara oli juba kirjutatud x86/x86‑64 platvormidele. Kõige tugevam tugi oli HP‑põhistel operatsioonisüsteemidel (nt HP‑UX) ning mõningatel OpenVMS ja Linuxi versioonidel; Microsoft pakkus Itaniumi jaoks piiratud Windows Serveri tuge mõneks ajaks. Tuleb rõhutada, et Itaniumi arvutilõime edu sõltus suures osas kompilatsioonitehnoloogiast — efektiivsed kompilaatorid pidid ära kasutama arhitektuuri pakutavat paralleelsust, mis osutus keerukaks ülesandeks.
Miks Itanium ei saavutanud oodatud edu
- Tagasiühilduvus puudus: Itanium ei jooksutanud otse x86‑programme, mis tekitas üleminekuprobleeme klientidele ja tarkvaraarendajatele.
- AMD64 ja x86‑64 edu: AMD ja seejärel Intel laiendasid x86 arhitektuuri 64‑bitiseks (AMD64 / Intel 64), pakkudes nii 64‑bitist aadressruumi kui ka täielikku tagurpidi ühilduvust — see osutus palju praktilisemaks ja kiiremini aktsepteeritavaks lahenduseks.
- Komplekssus ja kompilaatorid: Itanium vajab tõhusate käskude planeerimist juba kompilaatoritasandil; nõrk kompilaatoritugi tekitas sageli kehvemaid päriselustsenaariumi tulemusi.
- Turundus ja ökosüsteem: Arendajate, tarkvarafirmade ja riistvarapartnerite lai tugi ei jõudnud oodatud tasemeni, mistõttu puudus laialdane tarkvaraportsik ja teenusetugi.
- Kulud ja riskid: Itaniumi süsteemid olid sageli kallimad ja nõudsid spetsiaalset hooldust, mis vähendasid nende atraktiivsust tavapäraste serverilahenduste kõrval.
Peamised Itaniumi põlvkonnad ja kasutusalad
Esimesed Itaniumi kiibid ilmusid 2001. aastate alguses (esimesed mudelid olid tuntud koodnimega Merced) ja järgnevad põlvkonnad parandasid nii jõudlust kui mälutuge. Itaniumit kasutati peamiselt suurtes ettevõtete serverites, andmebaasides ja muudes missioonikriitilistes keskkondades, kus oli nõutud suur mälumaht, töökindlus (RAS‑funktsioonid) ja platvormi stabiilsus.
Pärastlõpp ja pärand
Kuigi Itaniumi turuosa jäi väikseks võrreldes x86‑baasiliste serveritega, oli arhitektuur mõjutanud protsessoridisaini ja tõstnud esile kompilaatorite ja riistvara vahelise koostöö olulisuse. Paljud ideed ja tehnilised lahendused, mis proovitati Itaniumis, leidsid hiljem kasutust teistes süsteemides või mõjutasid tööstuse arusaamu paralleelsuse ärakasutamisest riistvaralisel tasandil.
Itaniumi ametliku tooteeluea lõpp kuulutati välja 30. jaanuaril 2019, mille järel Intel lõpetas uute Itanium‑kiipide arendamise ja müügi. Paljud Itaniumi kasutavad kliendid läksid üleminekule x86‑64‑põhiste või muude platvormide peale, samas kui mõned ettevõtted ja süsteemid jätkasid seni vajaliku toe kasutamist kuni migratsioonini.
Turu vastuvõtt
Võimsat tüüpi serverite turg
Kui Itanium 2001. aastal esmakordselt välja anti, oli selle kiirus teiste protsessoritüüpidega võrreldes pettumust valmistav. Olemasolevate x86-rakenduste ja operatsioonisüsteemide kasutamine oli eriti halb, kusjuures üks 2001. aasta test näitas, et see oli sama kiire kui 100 MHz Pentium (sel ajal olid turul 1,1 GHz Pentiumid). Itanium ei olnud edukas võrreldes IA-32 või RISC-ga ning veelgi halvemini läks, kui ilmus x86-64, mis töötas vanade x86-rakendustega.
2009. aasta artiklis Itanium'i ajaloost - "How the Itanium Killed the Computer Industry" - teatas ajakirjanik John C. Dvorak: "See on jätkuvalt üks viimase 50 aasta suuri fiaskoid [halbu olukordi]" . Tehnoloogiakirjanik Ashlee Vance kirjutas, et aeglus kiiruse ja väljalaskmise osas "muutis toote kiibitööstuses naljakaks". Donald Knuth ütles ühes intervjuus, et "Itaniumi lähenemine... pidi olema nii kohutav - kuni selgus, et soovitud kompilaatoreid oli põhimõtteliselt võimatu kirjutada".
Nii Red Hat kui ka Microsoft teatasid, et nad lõpetavad Itaniumi kasutamise oma operatsioonisüsteemidega. Siiski on teised Linuxi distributsioonid, nagu Gentoo ja Debian, Itaniumi jaoks endiselt saadaval. 22. märtsil 2011 teatas Oracle, et nad ei toeta enam Itaniumit, kuid nende olemasolevate toodete toetus jätkub. 2013. aasta oktoobris teatas Oracle, et nad annavad 2014. aasta alguseks välja Oracle Database 12.1.0.1.0 HP-UX Itanium 11.31 peal.
Üks varasem Inteli ettevõtte ametnik ütles, et Itanium muutus Inteli jaoks kasumlikuks (suudab palju raha teenida) 2009. aasta lõpus. 2009. aastal ja hiljem kasutas Itaniumit peamiselt HP serverites, kes valmistas 95% Itaniumi serveritest, seega oli Itaniumi peamine operatsioonisüsteem HP-UX. 22. märtsil 2011 teatas Intel, et nad jätkavad Itaniumi täielikku toetamist, kusjuures palju uusi Itaniumi kiipe luuakse ja õigeaegselt.
Muud turud
Ehkki Itaniumil läks kõrgtehnoloogiliste arvutite puhul hästi, soovis Intel, et seda kasutataks rohkem kui algset x86-arhitektuuri.
AMD otsustas lihtsama idee kasuks, luues x86-64, 64-bitise täienduse x86 arhitektuurile, mida Microsoft peagi Microsoft Windowsis toetas, nii et Intel pidi sama tüüpi 64-bitise täienduse lisama ka Inteli x86 protsessoritesse. x86-64 saab kasutada olemasolevaid 32-bitiseid rakendusi täielikul riistvara kiirusel, kuid on 64-bitine mälu adresseerimine ja muud täiendused uutele rakendustele. Sellest arhitektuurist on nüüdseks saanud enim kasutatav 64-bitine arhitektuur lauaarvutite ja sülearvutite turul. 64-bitine ARMv8 arhitektuur on paljude mobiilseadmete jõuallikaks, mida kasutatakse tänapäeval iPhone'is, iPadis, iPod Touches ja nüüd ka paljudes Android-telefonides ja -tablettides, nagu Nexus 6P ja Nexus 9. Mõned Itaniumil põhinevad tööjaamad võeti algselt kasutusele selliste ettevõtete poolt nagu SGI, kuid neid ei ole enam saadaval. Kuna AMD valmistas esimese x86-64 kiibi, nimetatakse seda arhitektuuri operatsioonisüsteemides tavaliselt "amd64".



Ajalugu
Areng: 1989-2000
1989. aastal arvas HP, et RISC-arhitektuurid (Reduced InstructionSet Computing) on kinni ühe käsu tsükli kohta. HP teadlased püüdsid luua uut tüüpi protsessorarhitektuuri, mida hiljem nimetati EPIC (Explicitly Parallel Instruction Computing), mis võimaldab protsessoril kasutada palju juhiseid igas taktsüklis. EPIC kasutab VLIW-arhitektuuri (Very Long Instruction Word) vormi, kus 1 käsusõna sisaldas palju käske. EPICi puhul kontrollib kompilaator, milliseid käske saab kasutada korraga, nii et protsessor saab käske käivitada, ilma et oleks vaja keerulisi meetodeid, et näha, milliseid käske korraga kasutada. Selle idee eesmärk on võimaldada koodi paremat kontrollimist kompileerimise ajal, et kontrollida täiendavaid võimalusi mitme käsu samaaegseks täitmiseks, ning lihtsustada protsessori disaini ja säästa elektrit, kaotades vajaduse juhiste tööaja planeerimise järele.
HP arvas, et HP-sugustele ettevõtlussüsteemidega tegelevatele ettevõtetele ei ole hea teha oma protsessoreid, mistõttu tegi HP 1994. aastal Inteliga koostööd, et luua EPICi ideede põhjal loodud IA-64 arhitektuur. Intel tahtis teha suuri jõupingutusi IA-64 loomiseks, eeldades, et selle tulemusel valmivat protsessorit kasutatakse enamikes ettevõtlussüsteemides. HP ja Intel tegid 1998. aastal suuri jõupingutusi, et teha esimene Itanium-toode, Merced.
Lootmise ajal arvasid Intel, HP ja teised tööstuse analüütikud, et IA-64 saab väga populaarseks serverites, tööjaamades ja lauaarvutites ning ühel päeval asendab RISC ja Complex Instruction Set Computing (CISC) arhitektuurid mitmeotstarbeliste rakenduste jaoks. Compaq ja Silicon Graphics lõpetasid oma Alpha ja MIPS arhitektuuride arendamise, et minna üle Itaniumi arhitektuurile.
Paljud rühmad lõid Itaniumile operatsioonisüsteeme, sealhulgas Microsoft Windows, OpenVMS, Linux ja UNIX-tüübid nagu HP-UX, Solaris, Tru64 UNIX ja Monterey/64 (kolm viimast ei lõpetanud kunagi tööd Itaniumil töötades). 1997. aastaks leidsid paljud, et Itanium'i arhitektuuri ja kompilaatorit oli keerulisem kasutada, kui nad arvasid. Tehnoloogilised probleemid, nagu näiteks suurte käsusõnade ja suurte vahemälude jaoks vajalik väga suur transistoride arv.[] Projektiga oli ka probleeme, sest meeskonna kaks osa kasutasid erinevaid meetodeid ja neil olid veidi erinevad prioriteedid. []Kuna Merced oli esimene EPIC-protsessor, oli selle loomisel rohkem probleeme, kui meeskond arvas. Lisaks nõuab EPIC-kontseptsioon erinevaid kompilaatori võimeid, mida polnud varem loodud, seega oli vaja rohkem uuringuid. []
Intel teatas 4. oktoobril 1999. aastal protsessori nime Itanium. Vaid mõne tunni jooksul oli nime Itanic kasutatud naljana (viide 1912. aastal uppunud "uppumatule" laevale Titanic ("Itanium + Titanic = Itanic")). "Itanic" on ka The Register ja teised kasutanud, et öelda, et mitme miljardi dollari suurune investeering Itaniumisse ja sellega kaasnev varajane nõudlus ei tähendaks midagi, sest nad arvasid, et Itanium ebaõnnestub.
Itanium (Merced): 2001
| Itanium (Merced) | |
|
Itanium protsessor | |
| Toodetud | juunist 2001 kuni juunini 2002 |
| Üldine(d) tootja(d) |
|
| Max. Protsessori taktisagedus | 733 MHz kuni 800 MHz |
| FSB kiirused | 266 MT/s |
| Käskude komplekt | Itanium |
| 1 | |
| L2 vahemälu | 96 KB |
| L3 vahemälu | 2 või 4 MB |
| Pistikupesa(d) |
|
| Põhinimi(d) |
|
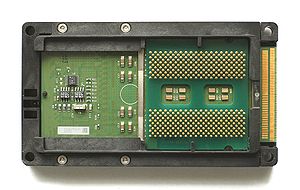
Kui Itanium 2001. aasta juunis välja anti, ei olnud selle jõudlus konkureerivatest RISC- ja CISC-protsessoritest parem. Itanium konkureeris madala võimsusega süsteemidega (peamiselt 4 CPU ja väikesed süsteemid) x86-protsessoritel põhinevate serverite ja suure võimsusega, näiteks IBMi POWER-arhitektuuriga ja Sun Microsystems'i SPARC-arhitektuuriga. Intel nihutas Itaniumi tööle suure võimsusega äri ja HPC-arvutitega, püüdes kopeerida x86 edukat turgu (st 1 arhitektuur, palju süsteemimüüjaid). 1. protsessoriversiooni edu seisnes ainult PA-RISCi asendamises HP süsteemides, Alpha asendamises Compaqi süsteemides ja MIPSi asendamises SGI süsteemides, kuid ka IBM tegi selle arhitektuuri põhjal superarvuti. POWER ja SPARC olid tugevad ja x86 arhitektuur kasvas rohkem ettevõtetes, kuna see oli lihtsamalt skaleeritav ja väga suur installeerimisbaas.
Ainult mõned tuhanded süsteemid, mis kasutasid esimest Itanium-protsessorit Merced, müüdi kehvema jõudluse, kõrge hinna ja vähem Itaniumist valmistatud tarkvara tõttu. Intel nägi, et Itanium vajab hea töö tagamiseks rohkem omamaist tarkvara, mistõttu Intel valmistas tuhandeid süsteeme sõltumatutele tarkvaratootjatele, et aidata neil Itaniumi tarkvara teha. HP ja Intel tõid aasta hiljem turule 2. Itanium-protsessori, Itanium 2.
Itanium 2: 2002-2010
| Itanium 2 (McKinley) | |
|
Itanium 2 protsessor | |
| Toodetud | Aastatel 2002-2010 |
| Kujundanud | Intel |
| Üldine(d) tootja(d) |
|
| Max. Protsessori taktisagedus | 900 MHz kuni 2,53 GHz |
| Käskude komplekt | Itanium |
| 1, 2, 4 või 8 | |
| L2 vahemälu | 256 KB Itanium2 |
| L3 vahemälu | 1,5-32 MB |
| Pistikupesa(d) |
|
| Põhinimi(d) |
|
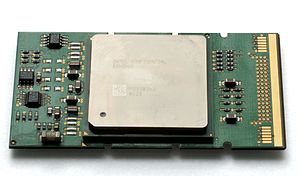
Itanium 2 protsessor anti välja 2002. aastal, mis oli mõeldud ettevõtete serveritele ja mitte kõigile suure võimsusega arvutitele. Itanium 2 1. versiooni, koodnimega McKinley, lõid HP ja Intel. See parandas paljud 1. Itanium-protsessori probleemid, mis olid peamiselt põhjustatud halvast mälu allsüsteemist. McKinley's oli 221 miljonit transistorit (neist 25 miljonit olid loogika jaoks) ja oli 19,5 mm x 21,6 mm (421 mm 2) ning see loodi 180 nm disainiprotsessi ja 6 alumiiniumikihiga CMOS-protsessi abil.
2003. aastal andis AMD välja Opteroni, mis rakendas esimese x86-64 arhitektuuri (tollal AMD64). Opteron oli palju edukam, sest see oli x86-lt lihtne uuendada. Intel rakendas x86-64 oma Xeon-protsessorites 2004. aastal.
Intel andis 2003. aastal välja uue Itanium 2 protsessori koodnimega Madison. Madison kasutas 130 nm protsessorit ja oli kõigi uute Itanium-protsessorite aluseks kuni 2006. aasta juunini.
2005. aasta märtsis teatas Intel, et töötab uue Itanium-protsessori (koodnimega Tukwila) kallal, mis tuleb välja 2007. aastal. Tukwilal oleks 4 protsessori südamikku ja see asendaks Itanium'i buss uue Common System Interface'iga, mida kasutaks ka uus Xeon protsessor. Hiljem samal aastal muutis Intel Tukwila väljalaske kuupäeva 2008. aasta lõpuks.
2005. aasta novembris tegid suurimad Itanium-serverite tootjad koos Inteli ja paljude tarkvaratootjatega koostööd, et luua Itanium Solutions Alliance, et edendada arhitektuuri ja kiirendada tarkvaraportimist. Allianss väidab, et selle liikmed investeerivad kümne aasta lõpuks 10 miljardit dollarit Itaniumi lahendustesse.
2006. aastal tõi Intel välja Montecito (mida turustati Itanium 2 9000-seeria nime all), 2- tuumalise protsessori, mille jõudlus oli ligikaudu 2 korda suurem ja energiakulu 20% väiksem.
Intel andis 2007. aasta novembris välja Itanium 2 9100 seeria, koodnimega Montvale. Mais 2009 muudeti taas Montvale'i järeltulija Tukwila väljalaskeplaani, mille väljalaskmine algseadmete tootjatele on kavandatud 2010. aasta esimesse kvartalisse.
Itanium 9300 (Tukwila): 2010
Itanium 9300 seeria protsessor, koodnimega Tukwila, ilmus 8. veebruaril 2010, suurema jõudluse ja mälu mahuga.
Tukwila kasutab 65 nm protsessorit, sellel on kaks kuni neli tuuma, kuni 24 MB protsessori vahemälu, Hyper-Threading tehnoloogia ja uued mälukontrollerid. Sellel on ka kahe seadme andmete parandus, mis aitab lahendada mäluprobleeme. Tukwilal on ka Intel QuickPath Interconnect (QPI), mis asendab Itaniumi bussiarhitektuuri. Selle maksimaalne protsessorisisene ribalaius on 96 GB/s ja maksimaalne mälu ribalaius 34 GB/s. QuickPathi abil on protsessoril sisseehitatud mälukontrollerid, mis kontrollivad mälu, kasutades QPI-liideseid, et suhelda teiste protsessorite ja I/O-keskuste vahel. QuickPathi kasutatakse ka Nehalem-arhitektuuri kasutavate Inteli protsessoritega, nii et Tukwila ja Nehalem võivad kasutada samu kiibistikomplekte. Tukwila sisaldab nelja mälukontrollerit, millest igaüks toetab mitut DDR3 DIMM-i eraldi mälukontrolleri kaudu, sarnaselt Nehalem Xeon protsessorile koodnimega Beckton.
Itanium 9500 (Poulson): 2012
|
| See artikkel vajab ajakohastamist. (märts 2014) |
Itanium 9500 seeria protsessor, koodnimega Poulson, on Tukwila järeltulija ja see ilmus 8. novembril 2012. aastal. Inteli sõnul jätab see 45 nm protsessoritehnoloogia vahele ja kasutab selle asemel 32 nm protsessoritehnoloogiat; sellel on 8 tuuma, 12 laiu küsimusi sisaldav arhitektuur, multi-threading-lisandid ja uued käsud parallelismiks, sealhulgas virtualiseerimiseks. Poulson L3 vahemälu suurus on 32 MB. L2 vahemälu suurus on 6 MB, 512 I KB, 256 D KB tuumade kohta. Poulsoni suurus on 544 mm², mis on väiksem kui Tukwila suurus (698,75 mm²).
ISSCC 2011 konverentsil esitas Intel ettekande "32 nm 3,1 miljardi transistoriga 12-Wide-Issue Itanium protsessor missioonikriitiliste serverite jaoks". Arvestades, et Intel on ISSCC-l varemgi Itanium-mikroprotsessorite kohta üksikasju jaganud, viitab see paber tõenäoliselt Poulsonile. Analüütik David Kanter spekuleerib, et Poulson kasutab uut arhitektuuri, millel on täiustatud mitmikeermestuse vorm, mis kasutab koguni kahte niiti, et parandada jõudlust ühe- ja mitmikeermelise töö puhul. Uus teave avaldati Hot Chips konverentsil.
Uue teabe kohaselt on täiustatud mitmelülitamist, parandatud töökindlust (Instruction Replay RAS) ja mõned uued juhised (niidiprioriteet, täisarvuline juhis, vahemälu eelvalimine, vihjed andmetele juurdepääsuks).
Inteli tootemuudatuse teatises (PCN) 111456-01 oli loetletud 4 Itanium 9500 seeria protsessori mudelit, mis eemaldati dokumendi muudetud versioonist. Hiljem olid need osad loetletud Inteli materjalideklaratsiooni andmelehtede (MDDS) andmebaasis. Intel avaldas hiljem Itanium 9500 võrdlusjuhendi.
Mudelid on järgmised:
| Protsessori number | Sagedus |
| 9520 | 1,73 GHz |
| 9540 | 2,13 GHz |
| 9550 | 2,4 GHz |
| 9560 | 2,53 GHz |

Turuosa
Võrreldes Xeon serveriprotsessoritega ei ole Itanium kunagi olnud Inteli jaoks suur toode. Intel ei avalda tootmisnumbreid. Ühe tööstusharu analüütiku hinnangul oli 2007. aastal tootmismaht 200 000 protsessorit aastas.
Gartner Inc. andmetel oli 2007. aastal kõigi tootjate poolt müüdud Itanium-serverite (mitte protsessorite) koguarv umbes 55 000. (Ei ole selge, kas klastriserverid loeti ühe serveri alla või mitte.) See on võrreldav 417 000 RISC-serveriga (mis jagunesid kõigi RISC-tootjate vahel) ja 8,4 miljoni x86-serveriga. IDC teatab, et aastatel 2001-2007 müüdi kokku 184 000 Itaniumil põhinevat süsteemi. POWER/SPARC/Itanium-süsteemide kombineeritud turu kohta teatab IDC, et POWER moodustas 2008. aasta teises kvartalis 42% ja SPARC 32% tuludest, samas kui Itaniumil põhinevate süsteemide tulud ulatusid 26%-ni. IDC analüütiku sõnul oli 2007. aastal HP-l umbes 80% Itanium-süsteemide tuludest. Gartneri andmetel oli 2008. aastal HP-l 95% Itaniumi müügist. HP Itanium-süsteemide müük oli 2008. aasta lõpus 4,4 miljardit dollarit ja 2009. aasta lõpus 3,5 miljardit dollarit, võrreldes Suni UNIX-süsteemide müügitulu 35%-lise langusega ja IBMi 11%-lise langusega, kusjuures x86-64 serverite müügitulu kasvas sel ajavahemikul 14%.
Detsembris 2012 avaldas IDC uuringuaruande, mille kohaselt jääb Itanium-serverite tarne kuni 2016. aastani samale tasemele, kusjuures aastane tarne on 26 000 süsteemi (see on üle 50% väiksem kui 2008. aasta tarne).
Riistvara tugi
Süsteemid
| Serveritootjate Itanium-tooted | ||||
| Ettevõte | Viimane toode | |||
| nimi | aadressilt | aadressile | nimi | Protsessorid |
| Compaq | 2001 | 2001 | ProLiant 590 | 1-4 |
| IBM | 2001 | 2005 | x455 | 1-16 |
| Dell | 2001 | 2005 | PowerEdge 7250 | 1-4 |
| Hitachi | 2001 | 2008 | BladeSymphony1000 | 1-8 |
| Unisys | 2002 | 2009 | ES7000/one | 1-32 |
| SGI | 2001 | 2011 | Altix 4000 | 1-2048 |
| Fujitsu | 2005 | 2011 | PRIMEQUEST | 1-32 |
| HP | 2001 | nüüd | Terviklikkus | 1-256 |
| Bull | 2002 | nüüd | NovaScale 9410 | 1-32 |
| 2002 | nüüd | nx7700i | 1-256 | |
| Inspur | 2010 | nüüd | TS10000 | 2-1024 |
| Huawei | 2012 | nüüd | ???? | ???? |
2015. aasta seisuga[update] on Itanium-süsteemid vaid vähestel pakkujatel, näiteks HP, Bull, NEC, Inspur ja Huawei. Intel pakub šassiid, mida süsteemiintegraatorid saavad kasutada Itanium-süsteemide ehitamiseks. HP on ainus tööstuse 4st peamisest serveritootjast, kes müüb täna Itanium-süsteeme, luues vähemalt 80% kõigist Itanium-süsteemidest. HP müüs 2006. aasta esimeses kvartalis 7200 süsteemi. Enamik müüdud Itanium-süsteeme on ettevõtlusserverid ja masinad suuremahulisteks tehnilisteks arvutusteks, kusjuures iga süsteem maksab umbes 200 000 USA dollarit. Tüüpiline süsteem kasutab kaheksa või enam Itanium-protsessorit.
Kiibikomplektid
Itanium'i buss suhtleb ülejäänud süsteemiga. Ettevõtete serverite tootjad eristavad oma süsteeme, valmistades oma kiibistikomplektid, mis ühendavad protsessori mälu, ühendused ja perifeerseadmete kontrollerid. Kiibikomplekt on iga süsteemidisaini süsteemitasandi arhitektuuri süda. Kiibikomplekti loomine maksab kümneid miljoneid dollareid ja kujutab endast suurt pühendumust Itaniumi kasutamisele. IBM lõi kiibistikomplekti 2003. aastal ja Intel 2002. aastal, kuid kumbki neist ei ole välja töötanud kiibistikomplekti, mis toetaks selliseid tehnoloogiaid nagu DDR2 või PCI Express. Praegu toodavad selliseid tehnoloogiaid toetavaid kaasaegseid Itaniumile mõeldud kiibistikke HP, Fujitsu, SGI, NEC ja Hitachi.
"Tukwila" Itanium-protsessorimudel oli kavandatud jagama ühist kiibistikomplekti Intel Xeon protsessoriga EX (Inteli Xeon-protsessor, mis on mõeldud nelja protsessoriga ja suurematele serveritele). Eesmärk on lihtsustada süsteemiarendust ja vähendada kulusid serverite algseadmete tootjatele, kellest paljud arendavad nii Itanium- kui ka Xeon-põhiseid servereid. Kuid 2013. aastal lükati see eesmärk tagasi "hinnatud tulevaste rakendusvõimaluste jaoks".
Tarkvara tugi
Itaniumi toetavad või toetasid (st Windows-versiooni ei saa enam osta) järgmised operatsioonisüsteemid:
- HP-UX 11i; pakuti välja Intel 64 (x86-64) port, kuid hiljem tühistati see.
- Windowsi perekond
- Windows XP 64-bitine versioon (mitte toetatud; esimene toetatud Windows versioon)
- Windows Server 2003 (ei toetata)
- Windows Server 2008 (laiendatud tugi kuni 14. jaanuarini 2020. Laiendatud tugi saab ainult veaparandusi ja mitte uusi funktsioone, sealhulgas toetust tulevastele protsessoritele. See on viimane Windowsi versioon, mis toetab veel Itaniumit. Windows Server 2008 ja Server 2008 R2 said turvauuenduse 2018. aasta keskel).
- Windows Server 2008 R2 (see on viimane Windowsi versioon, mis toetab Itaniumi.)
- Linuxi distributsioonid
o
- Gentoo
- SUSE SLES (alates SLES 12-st ei toetata; SLES 11 SP4 toetab SLES 11 SP4)
o
- TurboLinux (oli esimene Linux, mida toetati 2001. aastal versiooniga 7)
- FreeBSD (toetamata; toetati 10.4 (kuni oktoobrini 2018 EOL) kui: "Tier 2 kuni FreeBSD 10. Pärast seda ei toetata.")
- NetBSD (ainult arendusharu, kuid "ametlik väljaanne ei ole kättesaadav".)
- OpenVMS I64 (kuni 2020); Intel 64 (x86-64) port on väljatöötamisel.
- NonStop OS; töötati välja Intel 64 (x86-64) port.
- Bull GCOS 8
- NEC ACOS-4 (2012. aasta septembri lõpus teatas NEC, et ACOS-4 puhul pöördub ta IA-64-lt tagasi varasema NOAH-seeria patenteeritud suurarvutiprotsessorite juurde).
Microsoft teatas, et Windows Server 2008 R2 on viimane Windows Serveri versioon, mis toetab Itaniumi (toetus algas XP-ga), ning et ta lõpetab ka Visual Studio ja SQL Serveri Itanium-versioonide arendamise. Samuti oli Red Hat Enterprise Linux 5 (esmakordselt välja antud märtsis 2007) viimane Itaniumi versioon Red Hat Enterprise Linuxist ja Debian ei toeta enam ametlikult Itaniumit (viimane ametliku toetusega versioon oli Debian 7 / Wheezy ja seda ei toetanud Long Term Support (LTS), kuid mitteametlik toetus uuematele Debianidele on endiselt piiratud kujul saadaval Debian Ports'i kaudu; viimane wheezy-backports'is saadaval olev tuum on Linux 3.14.0, mis ilmus 30. märtsil 2014, kuid on võimalik käsitsi uuendada viimasele 3.14.x versioonile või uuematele kerneliversioonidele, nagu 4.17.17 alates septembrist 2018) ja lisaks otsustas Canonical Ltd. mitte toetada Itaniumi Ubuntu 10.04 LTS puhul (ilmus aprillis 2010, nüüdseks lõpetatud). HP ei toeta ega sertifitseeri Linuxi Itanium 9300 (Tukwila) serveritel.
2012. aasta septembri lõpus teatas NEC, et naaseb IA-64-st varasema NOAH-liiniga patenteeritud suurarvutiprotsessorite juurde, mida nüüd toodetakse 40 nm-l toodetud neljatuumalise variandina, mida nimetatakse NOAH-6-ks.
HP müüb Itaniumile virtualiseerimistehnoloogiat nimega Integrity Virtual Machines.
Selleks, et Itaniumil saaks töötada rohkem tarkvara, toetas Intel platvormi jaoks optimeeritud kompilaatorite, eriti oma kompilaatorite komplekti arendamist. Alates 2010. aasta novembrist, kui võeti kasutusele uued tootepaketid, ei olnud Inteli Itaniumi kompilaatorid enam Intel x86 kompilaatoritega ühes tootes. Intel pakub Itanium-tööriistu ja Intel x86-tööriistu, sealhulgas kompilaatoreid, sõltumatult erinevates tootepakettides. GCC, Open64 ja Microsoft Visual Studio 2005 (ja hilisemad) on samuti võimelised tootma masinkoodi Itaniumile. Itanium Solutions Alliance'i andmetel oli 2008. aasta alguses Itaniumil põhinevatele süsteemidele saadaval üle 13 000 rakenduse, kuigi Sun on varem vaidlustanud Itaniumi rakenduste arvu. ISA toetas ka Gelato, Itanium HPC kasutajarühma ja arendajate kogukonda, mis portreteeris ja toetas Itaniumile avatud lähtekoodiga tarkvara.
Emulatsioon
Emulatsioon on tehnika, mis võimaldab arvutil täita teistsuguse arvuti jaoks kompileeritud binaarkoodi. Enne seda, kui IBM omandas 2009. aastal QuickTransit'i, sai IRIX/MIPSi ja Solarise/SPARCi jaoks mõeldud rakenduste binaartarkvara Linuxis/Itaniumis töötada emulatsiooni abil, mida nimetatakse "dünaamiliseks binaartõlgenduseks". Samamoodi rakendas HP meetodit PA-RISC/HP-UXi käivitamiseks Itanium/HP-UXil emulatsiooni abil, et lihtsustada PA-RISCi klientide üleminekut radikaalselt erinevale Itaniumi käsureale. Itanium-protsessoritel saab käsurea simulaatorite abil käivitada ka Groupe Bulli suurarvutikeskkonda GCOS ja mitmeid x86 operatsioonisüsteeme.
Konkurents
Itanium on suunatud ettevõtlusserverite ja kõrgjõudlusega arvutite (HPC) turgudele. Muude ettevõtete ja kõrgjõudlusega arvutite jaoks mõeldud protsessorite hulka kuuluvad Oracle Corporationi SPARC M7, Fujitsu SPARC64 X+ ja IBMi POWER8. Müüdud koguste järgi mõõdetuna on Itaniumile kõige tõsisemaks konkurendiks x86-64 protsessorid, sealhulgas Inteli enda Xeoni ja AMD Opteroni seeria. Alates 2009. aastast tarniti enamik servereid x86-64 protsessoritega.
2005. aastal moodustasid Itanium-süsteemid umbes 14% HPC-süsteemide tuludest, kuid see protsent on vähenenud, kuna tööstus on selle rakenduse puhul üle läinud x86-64 klastritele.
Gartneri 2008. aasta oktoobri dokumendis Tukwila protsessori kohta väideti, et "...Itanium'i tulevikuplaan tundub sama tugev kui mis tahes RISC-protsessoril, nagu Power või SPARC,".
Superarvutid ja kõrgjõudlusega arvutid
Itaniumil põhinev arvuti ilmus esmakordselt TOP500 superarvutite nimekirja 2001. aasta novembris. Parim koht, mille Itanium 2-põhine süsteem on kunagi saavutanud, oli 2004. aasta juunis, kui Thunder (LLNL) jõudis nimekirja 19,94 Teraflops'i Rmax-iga. Novembris 2004 jõudis Columbia 51,8 Teraflopsiga nimekirjas teisele kohale ja sellest ajast kuni juunini 2007 oli vähemalt üks Itaniumil põhinev arvuti esikümnes. Suurim Itaniumil põhinevate masinate arv nimekirjas oli 2004. aasta novembris 84 süsteemi (16,8%); 2012. aasta juuniks oli see arv langenud ühele süsteemile (0,2%) ja 2012. aasta novembris ei olnud nimekirjas enam ühtegi Itaniumil põhinevat süsteemi.

Protsessorid
Vabastatud protsessorid
Itanium-protsessorid näitavad võimekuse arengut. Merced oli kontseptsiooni tõestus. McKinley parandas oluliselt mäluhierarhiat ja võimaldas Itaniumil muutuda mõistlikult konkurentsivõimeliseks. Madison koos üleminekuga 130 nm protsessile võimaldas piisavalt vahemälu ruumi, et ületada peamised jõudluse kitsaskohad. Montecito, mille protsess on 90 nm, võimaldas kahetuumalist rakendamist ja jõudluse olulist paranemist vati kohta. Montvale lisas kolm uut omadust: südamiku tasandi lukustus, nõudluspõhine ümberlülitus ja kuni 667 MHz sagedusega eesmine buss.
| Koodinimi | protsess | Avaldatud | Kell | L2 vahemälu/ tuum | L3 vahemälu/protsessor | Buss | sureb/seade | südamikud/die | vatti/seade | Kommentaarid |
| Itanium | ||||||||||
| Merced | 180 nm | 2001-06 | 733 MHz | 96 KB | ei ole | 266 MHz | 1 | 1 | 116 | 2 MB L3 vahemälu väljalülituses |
| 800 MHz | 130 | 4 MB L3 vahemälu väljalülituses | ||||||||
| Itanium 2 | ||||||||||
| McKinley | 180 nm | 2002-07-08 | 900 MHz | 256 KB | 1,5 MB | 400 MHz | 1 | 1 | 130 | HW filiaali pikem |
| 1 GHz | 3 MB | 130 | ||||||||
| Madison | 130 nm | 2003-06-30 | 1,3 GHz | 3 MB | 130 | |||||
| 1,4 GHz | 4 MB | 130 | ||||||||
| 1,5 GHz | 6 MB | 130 | ||||||||
| 2003-09-08 | 1,4 GHz | 1,5 MB | 130 | |||||||
| 2004-04 | 1,4 GHz | 3 MB | 130 | |||||||
| 1,6 GHz | ||||||||||
| Deerfield | 8. september 2003 | 1,0 GHz | 1,5 MB | 62 | Madalpinge | |||||
| Hondo | 2004-Q1 | 1,1 GHz | 4 MB | 400 MHz | 2 | 1 | 260 | 32 MB L4 | ||
| Fanwood | 2004-11-08 | 1,6 GHz | 3 MB | 533 MHz | 1 | 1 | 130 | |||
| 1,3 GHz | 400 MHz | 62? | Madalpinge | |||||||
| Madison | 8. november 2004 | 1,6 GHz | 9 MB | 400 MHz | 130 | |||||
| 2005-07-05 | 1,67 GHz | 6 MB | 667 MHz | 130 | ||||||
| 2005-07-18 | 1,67 GHz | 9 MB | 667 MHz | 130 | ||||||
| Itanium 2 9000 seeria | ||||||||||
| Montecito | 90 nm | 2006-07-18 | 1,4 GHz | 256 KB (D) | 6-24 MB | 400 MHz | 1 | 2 | 104 | Virtualiseerimine, multisäeme, ei ole HW IA-32 |
| 1,6 GHz | 533 MHz | |||||||||
| Itanium 2 9100 seeria | ||||||||||
| Montvale | 90 nm | 31. oktoober 2007 | 1,42-1,66 GHz | 256 KB (D) | 8-24 MB | 400-667 MHz | 1 | 1-2 | 75-104 | Põhitasemel lukustatud, nõudluspõhine lülitus |
| Itanium 9300 seeria | ||||||||||
| Tukwila | 65 nm | 8. veebruar 2010 | 1,33-1,73 GHz | 256 KB (D)+512 | 10-24 MB | QPI kiirusega 4,8 GT/s | 1 | 2-4 | 130-185 | Uus punkt-punkt protsessorivõrk, QPI, mis asendab FSB. Turbo Boost |
| Itanium 9500 seeria | ||||||||||
| Poulson | 32 nm | 2012-11-08 | 1,73-2,53 GHz | 256 KB (D)+512 | 20-32 MB | QPI kiirusega 6,4 GT/s | 1 | 4-8 | 130-170 | kahekordistunud emissioonilaius (6-st 12 käsuni tsükli kohta), käskude kordamise tehnoloogia, kahe valdkonna hüperreading. |
| Koodinimi | protsess | Avaldatud | Kell | L2 vahemälu/ tuum | L3 vahemälu/protsessor | Buss | sureb/seade | südamikud/die | vatti/seade | Kommentaarid |
Tulevased töötlejad
HP vs. Oracle'i toetusprotsessi käigus ilmnesid Santa Clara maakonna kohtuniku poolt 2008. aastal avalikustatud kohtudokumentidest, et Hewlett-Packard maksis Intel Corp. umbes 440 miljonit dollarit Itanium-mikroprotsessorite tootmise ja uuendamise jätkamise eest aastatel 2009-2014. 2010. aastal sõlmisid kaks ettevõtet veel 250 miljoni dollari suuruse lepingu, mis kohustas Inteli jätkama Itaniumi keskseadmete tootmist HP masinatele kuni 2017. aastani. Lepingute tingimuste kohaselt peab HP maksma Intelilt saadud kiipide eest, samal ajal kui Intel toob turule Tukwila, Poulson, Kittson ja Kittson+ kiibid, et järk-järgult suurendada platvormi jõudlust.
Kittson
Kittson peaks Poulsonile järgnema 2015. aastal. Kittson, nagu ka Poulson, valmistatakse Inteli 32 nm protsessoriga. Teada on vähe muid üksikasju peale koodnime olemasolu ning binaarsuse ja pesa ühilduvuse Poulsoni ja Tukwilaga, kuigi x86 Xeoniga ühisele pesale üleminekut "hinnatakse tulevaste rakendusvõimaluste jaoks" pärast Kittsonit.
Ajakava
- 1989:
- HP alustab EPICi uurimist.
- 1994:
- juuni: HP ja Intel teatavad partnerlusest.
- 1995:
- September: HP, Novell ja SCO teatavad plaanist luua "suure mahuga UNIXi operatsioonisüsteem", et pakkuda "64-bitist võrguarvutust HP/Inteli arhitektuuril".
- 1996:
- Oktoober: Compaq teatab, et hakkab kasutama IA-64.
- 1997:
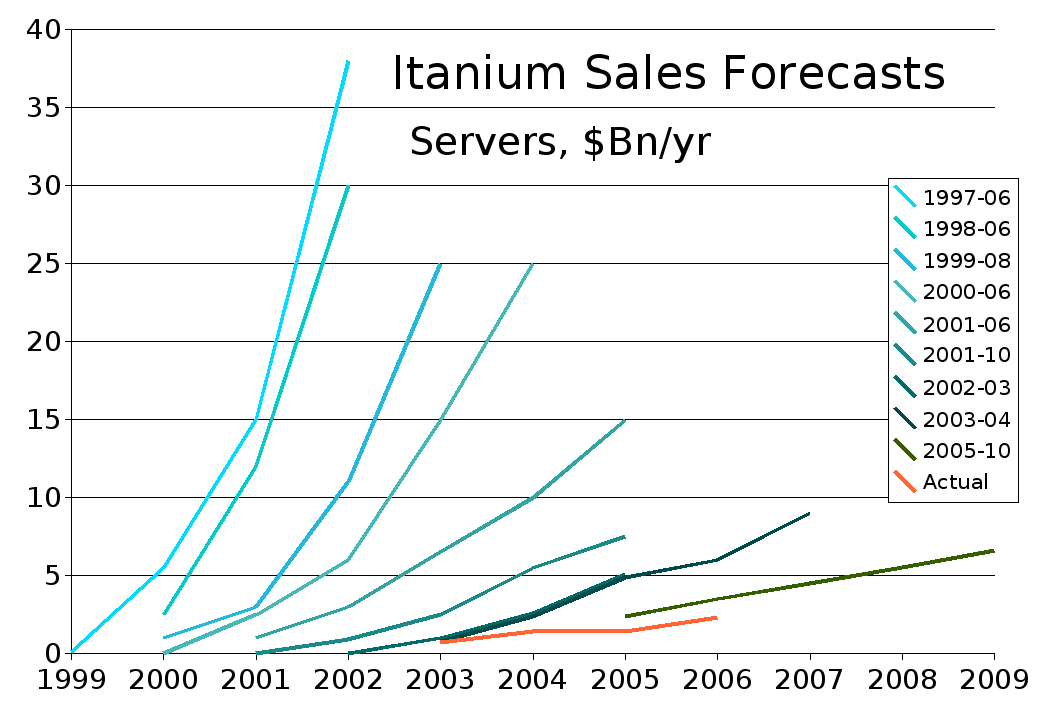
- juuni: IDC prognoosib, et 2001. aastaks jõuab IA-64 süsteemide müük 38 miljardi dollarini aastas.
- Oktoober: Dell teatab, et hakkab kasutama IA-64.
- Detsember: Intel ja Sun teatavad ühisest jõupingutusest Solaris'e üleviimiseks IA-64-le.
- 1998:
- Märts: SCO tunnistab, et HP/SCO Unixi liit on nüüdseks surnud.
- juuni: IDC prognoosib, et 2001. aastaks jõuab IA-64 süsteemide müük 30 miljardi dollarini aastas.
- juuni: Intel teatab, et Merced lükatakse 1999. aasta teisest poolest 2000. aasta esimesse poolde.
- September: IBM teatab, et hakkab ehitama Mercedil põhinevaid masinaid.
- Oktoober: Moodustatakse projekt Monterey, et luua ühine UNIX IA-64 jaoks.
- 1999:
- Veebruar: Moodustatakse projekt Trillian, et portida Linux IA-64-le.
- august: IDC ennustab, et IA-64 süsteemide müük jõuab 2002. aastaks 25 miljardi dollarini aastas.
- Oktoober: Intel kuulutab välja nime Itanium.
- Oktoober: terminit Itanic kasutatakse esmakordselt The Register'is.
- 2000:
- Veebruar: Projekt Trillian annab lähtekoodi.
- juuni: IDC ennustab, et Itanium-süsteemide müük jõuab 2003. aastaks 25 miljardi dollarini aastas.
- Juuli: Sun ja Intel loobuvad Solaris-on-Itanium plaanidest.
- august: AMD avaldab x86-64 spetsifikatsiooni, mis on 64-bitiste laienduste kogum Inteli enda x86 arhitektuurile, mis on mõeldud konkureerima IA-64-ga. Lõpuks hakkab ta seda turustama nime "AMD64" all.
- 2001:
- juuni: IDC ennustab, et Itanium-süsteemide müük jõuab 2004. aastaks 15 miljardi dollarini aastas.
- juuni: Projekt Monterey sureb.
- Juuli: Itanium ilmub.
- Oktoober: IDC ennustab, et Itanium-süsteemide müük jõuab 2004. aasta lõpuks 12 miljardi dollarini aastas.
- November: IBMi 320-protsessoriline Titan NOW Cluster National Center for Supercomputing Applications'is on TOP500 nimekirjas 34. kohal.
- November: Compaq lükkab Itanium toote väljalaskmist edasi protsessoriprobleemide tõttu.
- detsember: Gelato moodustatakse.
- 2002:
- Märts: IDC ennustab, et Itanium-süsteemide müük jõuab 2004. aasta lõpuks 5 miljardi dollarini aastas.
- juuni: Itanium 2 ilmub.
- 2003:
- Aprill: IDC prognoosib, et Itanium-süsteemide müük jõuab 2007. aasta lõpuks 9 miljardi dollarini aastas.
- Aprill: AMD annab välja Opteroni, esimese x86-64 laiendustega protsessori.
- juuni: Intel annab välja "Madison" Itanium 2.
- 2004:
- Veebruar: Intel teatab, et on töötanud oma x86-64 rakendamise kallal (mida ta lõpuks turustab nime "Intel 64" all).
- juuni: Intel annab välja oma esimese x86-64 laiendustega protsessori, Xeon-protsessori koodnimega "Nocona".
- juuni: Thunder, LLNL-i süsteem 4096 Itanium 2 protsessoriga, on TOP500 nimekirjas teisel kohal.
- November: Columbia, SGI Altix 3700 koos 10160 Itanium 2 protsessoriga NASA Ames Research Centeris, on TOP500 nimekirjas teisel kohal.
- Detsember: 2004. aasta Itanium-süsteemide müük ulatub 1,4 miljardi dollarini.
- 2005:
- Jaanuar: HP portib OpenVMSi Itaniumile
- Veebruar: IBMi serverite disain loobub Itaniumi toetusest.
- juuni: Itanium 2 püstitab rekordilise SPECfp2000 tulemuse 2,801 Hitachi, Ltd. Computing blade.
- September: moodustatakse Itanium Solutions Alliance.
- September: Dell väljub Itaniumi äritegevusest.
- Oktoober: Itanium serverite müük ulatub kolmandas kvartalis 619 miljoni dollarini kvartalis.
- Oktoober: Intel teatab Montecito, Montvale ja Tukwila üheaastastest viivitustest.
- 2006:
- Jaanuar: Itanium Solutions Alliance teatab, et 2010. aastaks investeerib Itaniumisse 10 miljardit dollarit.
- Veebruar: IDC prognoosib, et Itanium-süsteemide müük jõuab 2009. aastaks 6,6 miljardi dollarini aastas.
- juuni: Intel annab välja kahetuumalise "Montecito" Itanium 2 9000 seeria.
- 2007:
- Aprill: CentOS (RHEL-kloon) peatab Itaniumi toetuse 5.0 versiooniks.
- Oktoober: Intel laseb välja "Montvale" Itanium 2 9100 seeria.
- November: Intel nimetab perekonna Itanium 2 tagasi Itaniumiks.
- 2009:
- detsember: Red Hat teatab, et loobub Itaniumi toetusest oma ettevõtte operatsioonisüsteemi Red Hat Enterprise Linux 6 järgmises versioonis.
- 2010:
- Veebruar: Intel kuulutab välja Itanium 9300 seeria "Tukwila".
- Aprill: Microsoft teatab Itaniumi toetuse järkjärgulisest lõpetamisest.
- Oktoober: Intel teatab uutest Intel C++ kompilaatori ja Intel Fortrani kompilaatori versioonidest x86/x64 jaoks, samas kui Itaniumi toetus on saadaval ainult vanemates versioonides.
- 2011:
- Märts: Oracle Corporation teatab, et lõpetab Itaniumile mõeldud rakendustarkvara, vahendusprogrammide ja Oracle Linuxi arendamise.
- Märts: Intel ja HP kordavad oma toetust Itaniumile.
- Aprill: Huawei ja Inspur teatavad, et nad arendavad Itanium-servereid.
- 2012:
- Veebruar: HP ja Oracle Corporationi vahelise kohtuasja kohtupaberid avaldati, mis andsid ülevaate sellest, et HP maksis Intelile 690 miljonit dollarit, et hoida Itaniumit elutegevuses.
- SAP lõpetab Business Objects'i toetuse Itaniumil.
- September: vastuseks kohtuotsusele taastab Oracle Oracle'i tarkvara toetuse Itaniumi riistvarale.
- 2013:
- Jaanuar: Intel tühistab Kittsoni kui Poulsoni 22 nm kahanemise, viies selle asemel üle oma 32 nm protsessile.
- November: HP teatab, et tema NonStop serverid hakkavad kasutama Intel 64 (x86-64) kiipe.
- 2014:
- Detsember: HP teatab, et nende järgmise põlvkonna Superdome X ja Nonstop X serverid on varustatud Intel Xeon protsessoritega, mitte Itaniumiga. Kuigi HP jätkab Itaniumil põhineva Integrity portfelli müüki ja toetust, tähistab täielikult Xeoni kiipidel põhineva mudeli kasutuselevõtt ajastu lõppu.
Küsimused ja vastused
K: Mis on Itanium?
V: Itanium on Inteli poolt valmistatud 64-bitise kiibiarhitektuuriga mikroprotsessoritüüp, mida mõnikord kasutatakse serverites.
K: Kas Itanium on seotud Inteli ja teiste tootjate valmistatud 64-bitiste peavoolu protsessoritega?
V: Ei, Itanium ei ole seotud Inteli ja teiste tootjate 64-bitiste peavoolu protsessoritega.
K: Kes algselt Itanium-protsessorid projekteeris?
V: Algselt projekteerisid HP ja Intel Itanium-protsessorid, kusjuures Intel tootis neid.
K: Kas Itanium-protsessorid olid populaarsed?
V: Ei, Itanium-protsessoreid ei kasutatud nii paljudes süsteemides, kui algselt loodeti.
K: Kes toetab endiselt Itanium-kiipidega süsteeme?
V: Enamasti toetab HP endiselt Itanium-kiipe kasutavaid süsteeme.
K: Millal teatas Intel, et Itanium-protsessorite perekond lõpetab oma tööea?
V: Intel teatas ametlikult Itanium-protsessoriperekonna eluea lõpust ja toote lõpetamisest 30. jaanuaril 2019. aastal.
K: Kas Intel toodab endiselt Itanium-protsessoreid?
V: Ei, Intel on ametlikult teatanud Itanium-protsessorite perekonna kasutusaja lõpust ja toote lõpetamisest.
Seotud artiklid
Autor
AlegsaOnline.com Itanium: Inteli 64-bitine serveriprotsessorite arhitektuur (lõpetatud 2019) Leandro Alegsa
URL: https://et.alegsaonline.com/art/48624
Allikad
- qdms.intel.com : "Select Intel Itanium Processors and Intel Scalable Memory Buffer, PCN 116733-00, Product Discontinuance, End of Life"
- anandtech.com : "Itanium–Is there light at the end of the tunnel?"
- venturebeat.com : "Exit interview: Retiring Intel chairman Craig Barrett on the industry's unfinished business"
- theregister.co.uk : "Benchmarks – Itanic 32bit emulation is 'unusable'. No kidding — slower than a P100"
- pcmag.com : "How the Itanium Killed the Computer Industry"
- bits.blogs.nytimes.com : "Ten Years After First Delay, Intel's Itanium Is Still Late"
- informit.com : "Interview with Donald Knuth"
- cloudblogs.microsoft.com : "Windows Server 2008 R2 to Phase Out Itanium"
- theregister.co.uk : "Red Hat pulls plug on Itanium with RHEL 6"
- pcworld.com : "Oracle stops developing software for Intel's Itanium Chips"
- support.oracle.com : Oracle Database 12.1.0.1.0 is planned for certification on HP-UX Itanium 11.31
- bits.blogs.nytimes.com : "A Decade Later, Intel's Itanium Chip Makes a Profit"
- newsroom.intel.com : "Intel Reaffirms Commitment to Itanium"
- features.techworld.com : "Will Intel abandon the Itanium?"