Rööptahukas (parallelepiped): määratlus, omadused ja näited
Avasta rööptahuka (parallelepiped) määratlus, geomeetrilised omadused, valemid ja praktilised näited — selge ja praktiline juhend õppimiseks ja harjutamiseks.
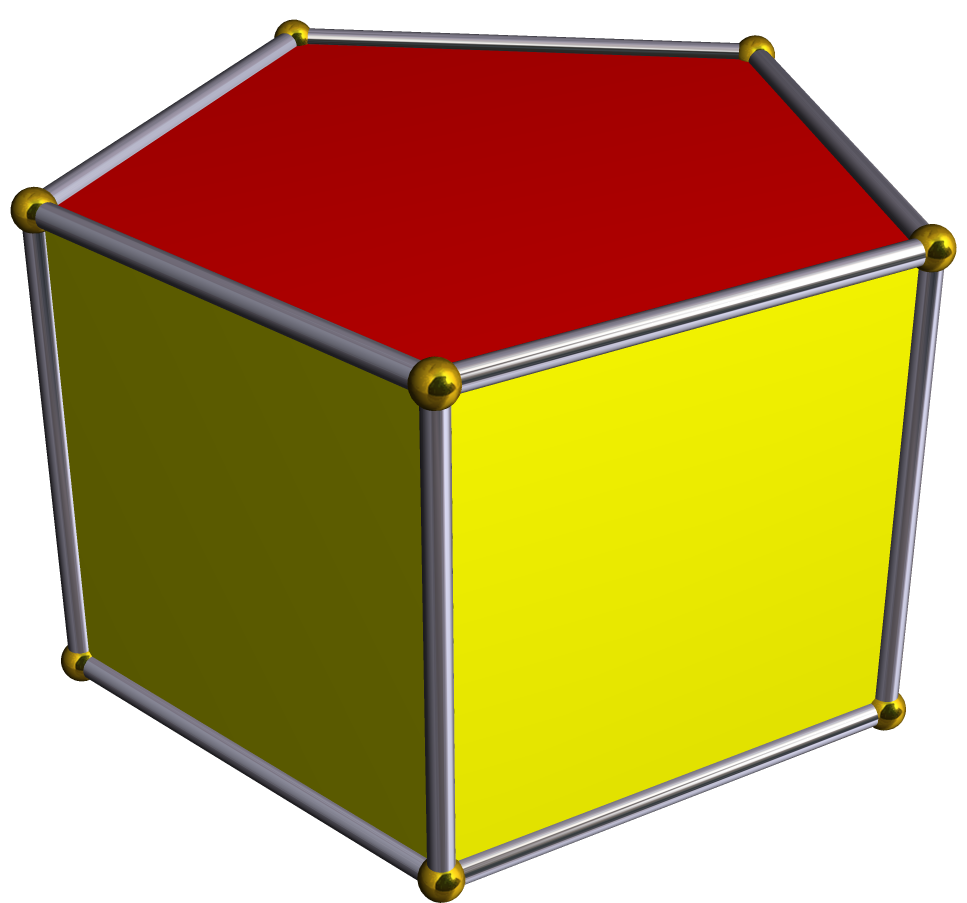
Geomeetrias on rööptahukas (inglise keeles parallelepiped) kolmemõõtmeline hulktahukas, mis koosneb kuuest paralleelogrammist. Mõnikord kohtab samas tähenduses ka mõistet romboid, kuid täpsemalt kasutatakse kolmemõõtmelise vastava kujundi puhul tavaliselt nimetust rööptahukas või parallelepiped. Rööptahukas on paralleelogrammi 3D-analoog samamoodi nagu kuup on ruudu analog või Ristkülikukujuline kuup on ristküliku analog tasapinnal.
Pildigalerii
7 Pildid




Määratlus
- kuue küljega hulktahukas (heksaeeder), millest igaüks on paralleelogramm;
- heksaeeder, millel on kolm paari paralleelseid tahke (iga paari kaks tahku on omavahel paralleelsed ja kongruentsed);
- prisma, mille alus on parallelogramm (st rööptahukas on parallelogrammist lähtuv prisma).
Peamised omadused
- Rööptahukas on lihtne heksaeeder: tal on 6 tahku, 12 serva ja 8 tippu.
- Iga tippu ühendavad kolm serva ja kolm tahku.
- Vastanduvad tahud on omavahel paralleelsed ja võrdse kujuga (kongruentsed).
- Vastanduvad servad on võrdsed ja paralleelsed; servad jagunevad kolmeks suunaks (kolm paari paralleelset serva).
- Ruumi diagonaalid lõikuvad üksteist keskpunktis ja jagunevad kaheks võrdseks osaks (diagonaalid poolitavad üksteist).
- Rööptahukas on afiinse transformatsiooni (nt nihutus, skaleerimine, shear) alusel püsiv: afiinse teisenduse pilt rööptahukas on jälle rööptahukas.
Koordinaat- ja vektorilähenemine
Rööptahukat saab mugavalt kirjeldada kolme mittesamale suunale kuuldud servavektoriga a, b ja c, lähtudes ühest tipust (näiteks alguspunktist O). Selle punkti X kõik tahapunktid on kujutatavad kujul
X = O + u·a + v·b + w·c, kus u, v, w ∈ [0,1].
Seda esitust kasutatakse ka mahu arvutamiseks ja geomeetriliste seoste tõestamiseks.
Mahuvormel ja diagonaalide pikkus
- Rööptahuka ruumala V = |a · (b × c)| — see on skalaartriplekti absoluutväärtus, kus a, b ja c on tipust lähtuvad servavektorid.
- Mahuna kehtib ka V = pindala(alus) × kõrgus, kui valida alusena üks paralleelogrammidest.
- Ruumidiagonaali pikkus, mis ühendab kahte vastastikust tippu, arvutatakse vektorina a + b + c ja selle pikkus on |a + b + c|.
Erijuhtumid ja näited
Ristkülikukujuline kuup (ehk risttahukas — kuus ristkülikukujulist tahku) on rööptahuka erijuhtum, kus kõik tahud on ristkülikud ja servad on omavahel risti paarides. Kuup on veel kitsam erijuhtum: kuus ruudukujulist tahku ja kõik servad võrdsed. Samuti on võimalik erijuhtudena saada romboeedrid (kuus rombikujulist tahku), kus kõigi tahkude kujuks on romb.
Kasutus ja rakendused
Rööptahukad esinevad sageli geomeetrias, lineaaralgebras ja füüsikas (nt elementaarsete parallelepipetiliste mahuühikute, ristsüsteemide ja kristallograafia kirjeldustes). Vektorivoogude, determinandidest rääkimise ja mahtude mõõtmise puhul on parallelepiped praktiline mudel.
Üldiselt on rööptahukas lihtne, kuid võimas kolmemõõtmeline kujund, mille omadused tulevad selgelt välja vektorkujutusest ja afiinsete transformatsioonide käitumisest.
Omadused
Mis tahes kolme paralleelset küljepaari võib vaadelda kui prisma baastasandit. Ristkülikukujulisel prismal on kolm neljast paralleelsest servast koosnevat komplekti; iga komplekti servad on võrdse pikkusega.
Paralleelpilbid tulenevad kuubiku lineaartransformatsioonidest (mitte-degeneratiivsetel juhtudel: bihektilised lineaartransformatsioonid).
Kuna iga külg on punktsümmeetria, on rööpkülikukujuline nelinurkne nelinurkne. Ka kogu rööpkülik on punktisümmeetria Ci (vt ka trikliinne). Iga tahk on väljastpoolt vaadatuna vastaskülje peegelpilt. Üldiselt on tahud kiraalsed, kuid rööptahukas ei ole seda.
Ruumi täitev tessellatsioon on võimalik mis tahes paralleelpileti kongruentsete koopiatega.
Köide
Ristküliku ruumala on selle aluse A pindala ja kõrguse h korrutis. Alus on ükskõik milline ristküliku kuuest küljest. Kõrgus on põhja ja vastaskülje vaheline risti kaugus.
Alternatiivne meetod määratleb vektorid a = (a1, a2, a3), b = (b1, b2, b3) ja c = (c1, c2, c3), et kujutada kolme serva, mis kohtuvad ühes tipus. Ristküliku ruumala on siis võrdne skalaarkolmikprodukti a - (b × c) absoluutväärtusega:
V = | a ⋅ ( b × c ) | = | b ⋅ ( c × a ) | = | c ⋅ ( a × b ) | {\displaystyle V=\left|\mathbf {a} \cdot (\mathbf {b} \times \mathbf {c} )\right|=\left|\mathbf {b} \cdot (\mathbf {c} \times \mathbf {a} )\right|=\left|\mathbf {c} \cdot (\mathbf {a} \times \mathbf {b} )\right|} 
See on tõsi, sest kui me valime b ja c, et esindada aluse servi, on aluse pindala ristprodukti definitsiooni järgi (vt ristprodukti geomeetriline tähendus),
A = | b | | c | sin θ = | b × c | , {\displaystyle A=\left|\mathbf {b} \right|\left|\mathbf {c} \right|\sin \theta =\left|\mathbf {b} \times \mathbf {c} \right|,} 
kus θ on nurk b ja c vahel ja kõrgus on
h = | a | cos α , {\displaystyle h=\left|\mathbf {a} \right|\cos \alpha ,} 
kus α on sisemine nurk a ja h vahel.
Jooniselt võime järeldada, et α suurus on piiratud 0° ≤ α < 90°. Vastupidi, vektor b × c võib moodustada koos a sisemise nurga β, mis on suurem kui 90° (0° ≤ β ≤ 180°). Nimelt, kuna b × c on paralleelne h-ga, on β väärtus kas β = α või β = 180° - α. Seega
cos α = ± cos β = | cos β | , {\displaystyle \cos \alpha =\pm \cos \beta =\left|\cos \beta \right|,} 
ja
h = | a | | cos β | . {\displaystyle h=\left|\mathbf {a} \right|\left|\cos \beta \right|. } 
Me järeldame, et
V = A h = | a | | b × c | | cos β | , {\displaystyle V=Ah=\left|\mathbf {a} \right|\left|\mathbf {b} \times \mathbf {c} \right|\left|\cos \beta \right|,} 
mis on skalaarprodukti (või punktprodukti) definitsiooni järgi võrdne absoluutväärtusega a - (b × c), Q.E.D.
Viimane väljend on võrdväärne ka kolmemõõtmelise maatriksi determinandi absoluutväärtusega, mis on moodustatud kasutades ridadena (või veergudena) a, b ja c:
V = | det [ a 1 a 2 a 3 b 1 b 2 b 3 c 1 c 2 c 3 ] | . {\displaystyle V=\left|\det {\begin{bmatrix}a_{1}&a_{2}&a_{3}\\b_{1}&b_{2}&b_{3}\\c_{1}&c_{2}&c_{3}\end{bmatrix}}\right|. } 
See leitakse Crameri reegli abil kolme vähendatud kahemõõtmelise maatriksi kohta, mis on leitud originaalis.
Kui a, b ja c on ristkülikukujulise serva pikkused ja α, β ja γ on servade vahelised sisemise nurgad, siis on ruumala
V = a b c 1 + 2 cos ( α ) cos ( β ) cos ( γ ) - cos 2 ( α ) - cos 2 ( β ) - cos 2 ( γ ) . {\displaystyle V=abc{\sqrt {1+2\cos(\alpha )\cos(\beta )\cos(\gamma )-\cos ^{2}(\alpha )-\cos ^{2}(\beta )-\cos ^{2}(\gamma )\,}}. } 
Vastav tetraeeder
Mis tahes tetraeedri, mille kolm kokkulangevat serva on ühised paralleelpileti kolmele servale, ruumala on võrdne ühe kuuendikuga selle paralleelpileti ruumalast (vt tõestust).

Erijuhtumid
Sümmeetriatasandiga ristkülikukujulisi on kaks juhtumit:
- sellel on neli ristkülikukujulist külge
- sellel on kaks rombikujulist tahku, samas kui teistest tahkudest on kaks kõrvuti asetsevat võrdsed ja kaks teist samuti (need kaks paari on teineteise peegelpildid).
Vt ka monokliinne.
Ristkülikukujuline kuup, mida nimetatakse ka ristkülikukujuliseks paralleelpiloodiks või mõnikord lihtsalt kuubiks, on paralleelpiloot, mille kõik küljed on ristkülikukujulised; kuup on ruudukujuline kuup, millel on ruudukujulised küljed.
Romboeeder on rööpkülik, mille kõik küljed on rombilised; trigonaalne trapets on romboeeder, mille rombilised küljed on kongruentsed.

Täiuslik rööpkülikukujuline
Täiuslik rööpkülik on rööpkülik, millel on täisarvupikkused servad, külje diagonaalid ja ruumi diagonaalid. 2009. aastal näidati, et on olemas kümneid täiuslikke paralleelpilpeedid, mis andis vastuse Richard Guy avatud küsimusele. Ühe näite servad on 271, 106 ja 103, väikesed külgdiagonaalid 101, 266 ja 255, suured külgdiagonaalid 183, 312 ja 323 ning ruumilised diagonaalid 374, 300, 278 ja 272.
On teada mõned täiuslikud parallelopipeedid, millel on kaks ristkülikukujulist külge. Kuid ei ole teada, kas on olemas selliseid, mille kõik küljed on ristkülikukujulised; sellist juhtumit nimetatakse täiuslikuks kuuboidiks.
Parallelotope
Coxeter nimetas paralleelipeedi üldistust kõrgemates mõõtmetes paralleelotopiks.
Konkreetselt n-mõõtmelises ruumis nimetatakse seda n-mõõtmeliseks paralleelotoobiks või lihtsalt n-paralleelotoobiks. Seega on parallelogramm 2-parallelotoop ja paralleelpiliped on 3-parallelotoop.
Üldisemalt öeldes on paralleelotopil ehk voronoi-paralleelotopil paralleelsed ja kongruentsed vastassuunalised tahud. Seega on 2-parallelotoop parallelogon, mis võib sisaldada ka teatud kuusnurki, ja 3-parallelotoop on paralleloeder, mis sisaldab 5 tüüpi hulktahukaid.
N-parallelotoobi diagonaalid lõikuvad ühes punktis ja neid poolitab see punkt. Inversioon selles punktis jätab n-parallelotoobi muutumatuks. Vt ka eukleidilise ruumi isomeetriliste rühmade fikseeritud punktid.
K-parallelotoobi ühest tipust lähtuvad servad moodustavad vektorruumi k-ruumi ( v 1 , ... , v n ) {\displaystyle (v_{1},\ldots ,v_{n})} ja parallelotoobi saab nendest vektoritest taastada, võttes vektorite lineaarkombinatsioone, mille kaalud jäävad vahemikku 0 ja 1.
ja parallelotoobi saab nendest vektoritest taastada, võttes vektorite lineaarkombinatsioone, mille kaalud jäävad vahemikku 0 ja 1.
R m {\displaystyle \mathbb {R} ^{m}} kus m ≥ n {\displaystyle m\geq n}
kus m ≥ n {\displaystyle m\geq n} sisse põimitud n-parallelotoobi n-ruumala saab arvutada Grami determinandi abil. Teise võimalusena on ruumala vektorite välisprodukti norm:
sisse põimitud n-parallelotoobi n-ruumala saab arvutada Grami determinandi abil. Teise võimalusena on ruumala vektorite välisprodukti norm:
V = ‖ v 1 ∧ ∧ ∧ v n ‖ . {\displaystyle V=\left\|v_{1}\wedge \cdots \wedge v_{n}\right\|. } 
Kui m = n, siis on see n vektori determinandi absoluutväärtus.
Teine valem n-parallelotoobi P ruumala arvutamiseks R n {\displaystyle \mathbb {R} ^{n}}}  , mille n + 1 tippu on V 0 , V 1 , ... , V n {\displaystyle V_{0},V_{1},\ldots ,V_{n}}
, mille n + 1 tippu on V 0 , V 1 , ... , V n {\displaystyle V_{0},V_{1},\ldots ,V_{n}}  , on
, on
V o l ( P ) = | d e t ( [ V 0 1 ] T , [ V 1 1 ] T , ... , [ V n 1 ] T ) | , {\displaystyle {\rm {Vol}}(P)=|{\rm {det}}\ ([V_{0}\ 1]^{\rm {T}},[V_{1}\ 1]^{\rm {T}},\ldots ,[V_{n}\ 1]^{\rm {T}})|,} ![{\displaystyle {\rm {Vol}}(P)=|{\rm {det}}\ ([V_{0}\ 1]^{\rm {T}},[V_{1}\ 1]^{\rm {T}},\ldots ,[V_{n}\ 1]^{\rm {T}})|,}](https://www.alegsaonline.com/image/06a470275bbaf5ff23b98e44c462836f5a5eb71d.svg)
kus [ V i 1 ] {\displaystyle [V_{i}\ 1]}![{\displaystyle [V_{i}\ 1]}](https://www.alegsaonline.com/image/d2362bea0baa876bb7e76e2c43bbac55d2241798.svg) on reavektor, mis moodustub V i {\displaystyle V_{i}}
on reavektor, mis moodustub V i {\displaystyle V_{i}} ja 1 liitmisel. Determinant ei muutu, kui [ V 0 1 ] {\displaystyle [V_{0}\ 1]}
ja 1 liitmisel. Determinant ei muutu, kui [ V 0 1 ] {\displaystyle [V_{0}\ 1]}![{\displaystyle [V_{0}\ 1]}](https://www.alegsaonline.com/image/5fe4ab89b67a521fcf8097b1a2996fdda40fba1e.svg) lahutatakse [ V i 1 ] {\displaystyle [V_{i}\ 1]}-st. (i > 0), ja [ V 0 1 ] {\displaystyle [V_{0}\ 1]} viimasesse positsiooni paigutamine muudab ainult selle märki.
lahutatakse [ V i 1 ] {\displaystyle [V_{i}\ 1]}-st. (i > 0), ja [ V 0 1 ] {\displaystyle [V_{0}\ 1]} viimasesse positsiooni paigutamine muudab ainult selle märki.
Samamoodi on mis tahes n-simpleksi, mis jagab n kokkulangevat serva paralleelotopi, ruumala võrdne ühe 1/n! paralleelotopi ruumalaga.
Leksikograafia
See sõna esineb paralleelipipedonina Sir Henry Billingsley 1570. aasta Eukleidese elementide tõlkes. Pierre Hérigone kasutas 1644. aasta Cursus mathematicuse väljaandes kirjaviisi parallelepipedum. Oxfordi inglise sõnaraamatus on märgitud, et tänapäevane parallelepiped ilmus esmakordselt Walter Charletoni teoses Chorea gigantum (1663).
Charles Hutton's Dictionary (1795) näitab parallelopiped ja parallelopipedon, mis näitab ühendava vormi parallelo- mõju, nagu oleks teine element pigem pipedon kui epipedon. Noah Webster (1806) sisaldab õigekirja parallelopiped. Oxford English Dictionary 1989. aasta väljaanne kirjeldab parallelopiped (ja parallelipiped) selgesõnaliselt kui ebaõigeid vorme, kuid 2004. aasta väljaandes on need loetletud ilma kommentaarideta ja esitatud on ainult hääldusviisid, kus rõhk on viiendal silbil pi (/paɪ/).
Traditsioonilisest hääldusest eemaldumine on varjanud kreeka juurtest tulenevat erinevat jaotust, kus epi- ("peal") ja pedon ("maa") on kombineeritud, et saada epiped, lame "tasand". Seega on rööptahuka küljed tasapinnalised, kusjuures vastasküljed on paralleelsed.
Küsimused ja vastused
K: Mis on paralleelpiloot?
A: Ristkülik on kolmemõõtmeline kujund, mille moodustavad kuus parallelogrammi.
K: Millist teist terminit kasutatakse mõnikord paralleelepiloodi kohta?
V: Mõnikord kasutatakse ka terminit "romboid" samas tähenduses kui "rööpkülik".
K: Kuidas on rööptahukas seotud paralleelogrammiga?
V: Ristkülikukujuline on parallelogrammiga seotud samamoodi nagu kuup ruutu või kuubik ristkülikuga.
K: Kas eukleidilise geomeetria rööpküliku määratlus hõlmab kõiki nelja seotud mõistet?
V: Jah, eukleidilises geomeetrias hõlmab rööpküliku mõiste kõik neli seotud mõistet: rööpkülik, parallelogramm, kuup ja ruut.
K: Mis on afiinse geomeetria kontekst?
V: Affiinse geomeetria kontekst on selline, kus nurgad ei ole diferentseeritud.
Küsimus: Millised kujud kuuluvad afiinse geomeetria kontekstis paralleelploki mõiste alla?
V: Affiinses geomeetrias on paralleelpileti määratluse järgi lubatud ainult parallelogrammid ja paralleelpiletid.
K: Millised on kolm võrdväärset paralleelvipeedi definitsiooni?
V: Kolm võrdväärset paralleelpeedi definitsiooni on: kuue küljega hulktahukas, mille iga külg on parallelogramm; kolme paralleelse küljepaariga heksaedri ja prisma, mille alus on parallelogramm.
Seotud artiklid
Autor
AlegsaOnline.com Rööptahukas (parallelepiped): määratlus, omadused ja näited Leandro Alegsa
URL: https://et.alegsaonline.com/art/74539